
/***********************************************************************************************************************
* DISCLAIMER
* This software is supplied by Renesas Electronics Corporation and is only intended for use with Renesas products.
* No other uses are authorized. This software is owned by Renesas Electronics Corporation and is protected under all
* applicable laws, including copyright laws.
* THIS SOFTWARE IS PROVIDED "AS IS" AND RENESAS MAKES NO WARRANTIES REGARDING THIS SOFTWARE, WHETHER EXPRESS, IMPLIED
* OR STATUTORY, INCLUDING BUT NOT LIMITED TO WARRANTIES OF MERCHANTABILITY, FITNESS FOR A PARTICULAR PURPOSE AND
* NON-INFRINGEMENT. ALL SUCH WARRANTIES ARE EXPRESSLY DISCLAIMED.TO THE MAXIMUM EXTENT PERMITTED NOT PROHIBITED BY
* LAW, NEITHER RENESAS ELECTRONICS CORPORATION NOR ANY OF ITS AFFILIATED COMPANIES SHALL BE LIABLE FOR ANY DIRECT,
* INDIRECT, SPECIAL, INCIDENTAL OR CONSEQUENTIAL DAMAGES FOR ANY REASON RELATED TO THIS SOFTWARE, EVEN IF RENESAS OR
* ITS AFFILIATES HAVE BEEN ADVISED OF THE POSSIBILITY OF SUCH DAMAGES.
* Renesas reserves the right, without notice, to make changes to this software and to discontinue the availability
* of this software. By using this software, you agree to the additional terms and conditions found by accessing the
* following link:
* http://www.renesas.com/disclaimer
*
* Copyright (C) 2012, 2021 Renesas Electronics Corporation. All rights reserved.
***********************************************************************************************************************/
/***********************************************************************************************************************
* File Name : r_cg_tau_user.c
* Version : Code Generator for RL78/G10 V1.05.05.02 [08 Nov 2021]
* Device(s) : R5F10Y16
* Tool-Chain : gccrl78
* Description : This file implements device driver for TAU module.
* Creation Date: 2022/05/26
***********************************************************************************************************************/
/***********************************************************************************************************************
Includes
***********************************************************************************************************************/
#include "r_cg_macrodriver.h"
#include "r_cg_tau.h"
/* Start user code for include. Do not edit comment generated here */
/* End user code. Do not edit comment generated here */
#include "r_cg_userdefine.h"
/***********************************************************************************************************************
Pragma directive
***********************************************************************************************************************/
/* Start user code for pragma. Do not edit comment generated here */
/* End user code. Do not edit comment generated here */
/***********************************************************************************************************************
Global variables and functions
***********************************************************************************************************************/
/* Start user code for global. Do not edit comment generated here */
unsigned short int ADC_buffer;
unsigned short int Pre_buffer = 600;
unsigned short int Tmp_buffer;;
/* End user code. Do not edit comment generated here */
/***********************************************************************************************************************
* Function Name: r_tau0_channel0_interrupt
* Description : This function INTTM00 interrupt service routine.
* Arguments : None
* Return Value : None
***********************************************************************************************************************/
void r_tau0_channel0_interrupt(void)
{
/* Start user code. Do not edit comment generated here */
P0_bit.no4 = 1;
unsigned short int ADC_Result; //A/D結果格納変数
ADCS = 0;
if(P0_bit.no0 ==0){ //スイッチのオン、オフを読んで方向を決める
ADS = 0;
}
else if(P0_bit.no0 ==1){
ADS = 1;
}
R_ADC_Start(); //A/Dスタート
if(ADCS == 1){ //変換終了確認
;
}
R_ADC_Get_Result(&ADC_buffer); //バッファに格納
ADC_Result = Tmp_buffer = ADC_buffer*3+500; //A/Dコンバーターは10bitなので値が小さく扱いにくいので増幅、嵩上げする。
if(Tmp_buffer <= Pre_buffer ){ //A/D結果が前回の変換より小さければオン時間を20減らす
Tmp_buffer = (Pre_buffer-20);
if(ADC_Result > Tmp_buffer-30){ //停止点でバタつかないようにマージンを取る
Tmp_buffer = ADC_Result;
}
}
else if(Tmp_buffer >= Pre_buffer ){ //A/D結果が前回の変換より大きければをオン時間20増やす
Tmp_buffer = (Pre_buffer+20);
if(ADC_Result < Tmp_buffer+30){
Tmp_buffer = ADC_Result;
}
}
wait(Tmp_buffer); //オン時間待ち
Pre_buffer = Tmp_buffer;
P0_bit.no4 = 0;
/* End user code. Do not edit comment generated here */
}
/* Start user code for adding. Do not edit comment generated here */
/* End user code. Do not edit comment generated here */
Tmp_buffer = (Pre_buffer-
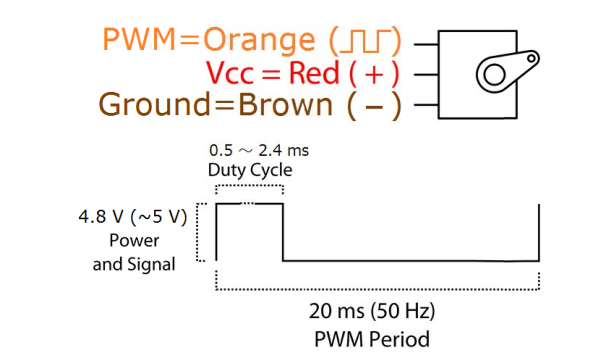
従来型のラジコンサーボは20msec毎に位置決めパルスを受け取ります。
この章はこれで終わりますがMCU本来のPWMも説明しています
Copyright © 面白半分